Process optimization with PharmaPy
In this notebook, we will learn how to use PharmaPy to perform process optimization. For this purpose, a four-unit process flowsheet containing continuous, semi-continuous and batch units will be used.
The process starts with a chemical synthesis step in a continuous PFR (R01), which yields a desired API C and a subproduct D. The material from R01 is contiuously collected HOLD01 and then sent to a batch crystallizer CR01, where cooling crystallization takes place. Finally, the slurry is taken to a batch filter F01, where a cake of solid material is recovered.

[1]:
# Standard Imports
import numpy as np
from copy import deepcopy
# PharmaPy imports
from PharmaPy.Reactors import PlugFlowReactor
from PharmaPy.Crystallizers import BatchCryst
from PharmaPy.SolidLiquidSep import Filter
from PharmaPy.Containers import DynamicCollector
from PharmaPy.Streams import LiquidStream
from PharmaPy.Phases import LiquidPhase, SolidPhase
from PharmaPy.Kinetics import RxnKinetics, CrystKinetics
from PharmaPy.Utilities import CoolingWater
from PharmaPy.Interpolation import PiecewiseLagrange
from PharmaPy.ProcessControl import DynamicInput
from PharmaPy.SimExec import SimulationExec
Could not find GLIMDA.
In the first part of this tutorial, a simulation will be set up by specifying the participating equipment and their connectivity by using the graph variable below. Then, a callback function that encapsulates the simulation will be put together, which can be repetedly called by an optimizer.
A simulation object flst is created using the SimulationExec class of PharmaPy, similar to what we did in the parameter estimation section. This time, the different unit operations specified in the graph variable are aggregated to the blank simulation. Remember that the documentation of any PharmaPy class or method can be retrieved by simultaneously pressing the Shift and Tab keys.
[2]:
# Reactor definition
# Physical properties of species
path_phys = '../data/compound_database.json'
# Initially define a flowsheet object for the simulation executive
# This object will allow us to simulate the entire flowsheet.
graph = 'R01 --> HOLD01 --> CR01 --> F01'
flst = SimulationExec(path_phys, flowsheet=graph)
# Specifying a stoichiometric matrix
rxns = ['A + B --> C', 'A + C --> D']
# Kinetics values; assuming deltaH values are 0.
k_vals = np.array([2.654e4, 5.3e2]) # Pre-exponential factor
ea_vals = np.array([4.0e4, 3.0e4]) # Activation Energies
# Use the imported RxnKinetics class to create a RxnKinetics instance
kinetics = RxnKinetics(path=path_phys, rxn_list=rxns, k_params=k_vals, ea_params=ea_vals)
##################
vol_liq = 0.010
tau_R01 = 1800
vol_flow = vol_liq / tau_R01 # m**3 / s
w_init = np.array([0, 0, 0, 0, 1])
liquid_init = LiquidPhase(path_phys, 313.15, mass_frac=w_init, vol=vol_liq)
# Cooling water
temp_set_R01 = 313.15
cw = CoolingWater(mass_flow=0.1, temp_in=temp_set_R01) # mass flow in kg/s
# ---------- Inlet streams
# Reactor
c_in = np.array([0.33, 0.33, 0, 0, 0])
temp_in = 40 + 273.15 # K
liquid_in = LiquidStream(path_phys, temp_in, mole_conc=c_in, vol_flow=vol_flow, name_solv='solvent')
diam_in = 1 / 2 * 0.0254 # 1/2 inch in m
flst.R01 = PlugFlowReactor(diam_in=diam_in, num_discr=50, isothermal=False)
flst.R01.Utility = cw
flst.R01.Kinetics = kinetics
flst.R01.Inlet = liquid_in
flst.R01.Phases = (liquid_init,)
flst.R01.Utility = cw
runtime_reactor = 3600 * 2
# With a continuous unit follow by a batch unit, we need a collection unit,
# a holding tank, to intermediately follow the the continuous unit.
flst.HOLD01 = DynamicCollector()
[3]:
# Defining the crystallizer
prim = (3e8, 0, 3) # kP in #/m3/s
sec = (4.46e10, 0, 2, 1e-5) # kS in #/m3/s
growth = (5, 0, 1.32) # kG in um/s
dissol = (1, 0, 1) # kD in um/s
# 0.2269 - 1.88e-3 * 323.15 + 3.89e-6 * 323.15 ** 2
solub_cts = np.array([2.269e2, -1.88e0, 3.89e-3])
x_gr = np.geomspace(1, 1500, num=35)
distrib_init = np.zeros_like(x_gr)
solid_cry = SolidPhase(path_phys, x_distrib=x_gr, distrib=distrib_init,
mass_frac=[0, 0, 1, 0, 0])
# Piecewise temperature profile definition
temp_program = np.array([[313.15, 303.15],
[303.15, 295.15],
[295.15, 278.15],
], dtype=np.float64)
# Initialize lagrange polynomial control object
runtime_cryst = runtime_reactor * 2.0
lagrange_fn = PiecewiseLagrange(runtime_cryst, temp_program)
# Defining the crystallizer with desired species 'C'
flst.CR01 = BatchCryst(target_comp='C', method='1D-FVM', scale=1e-9, controls={'temp': lagrange_fn.evaluate_poly})
flst.CR01.Kinetics = CrystKinetics(solub_cts, nucl_prim=prim, nucl_sec=sec, growth=growth, dissolution=dissol)
flst.CR01.Utility = CoolingWater(mass_flow=1, temp_in=283.15)
flst.CR01.Phases = solid_cry
[4]:
# Defining the filter.
# Filter
alpha = 1e11
Rm = 1e10
filt_area = 200 # cm**2
diam = np.sqrt(4/np.pi * filt_area) / 100 # m
flst.F01 = Filter(diam, alpha, Rm)
[5]:
# Gluing everything together and running the flowsheet
# runargs for the flowsheet
runargs_R01 = {'runtime': runtime_reactor}
sundials = {'maxh': 60}
runargs_hold = {'runtime': runtime_reactor}
runargs_CR01 = {'runtime': runtime_cryst, 'sundials_opts': sundials}
runargs_F01 = {'runtime': None}
# ---------- Running simulation
run_kwargs = {'R01': runargs_R01,
'HOLD01': runargs_hold,
'CR01': runargs_CR01,
'F01': runargs_F01
}
flst.SolveFlowsheet(kwargs_run=run_kwargs)
------------------------------
Running R01
------------------------------
Final Run Statistics: ---
Number of steps : 172
Number of function evaluations : 220
Number of Jacobian*vector evaluations : 445
Number of function eval. due to Jacobian eval. : 220
Number of error test failures : 0
Number of nonlinear iterations : 217
Number of nonlinear convergence failures : 1
Solver options:
Solver : CVode
Linear multistep method : BDF
Nonlinear solver : Newton
Linear solver type : SPGMR
Maximal order : 5
Tolerances (absolute) : 1e-06
Tolerances (relative) : 1e-06
Simulation interval : 0.0 - 7200.0 seconds.
Elapsed simulation time: 0.5636364 seconds.
Done!
------------------------------
Running HOLD01
------------------------------
Final Run Statistics: ---
Number of steps : 62
Number of function evaluations : 90
Number of Jacobian evaluations : 4
Number of function eval. due to Jacobian eval. : 28
Number of error test failures : 5
Number of nonlinear iterations : 87
Number of nonlinear convergence failures : 2
Solver options:
Solver : CVode
Linear multistep method : BDF
Nonlinear solver : Newton
Linear solver type : DENSE
Maximal order : 5
Tolerances (absolute) : 1e-06
Tolerances (relative) : 1e-06
Simulation interval : 0.0 - 7200.0 seconds.
Elapsed simulation time: 0.027952299999999042 seconds.
Done!
------------------------------
Running CR01
------------------------------
Final Run Statistics: ---
Number of steps : 503
Number of function evaluations : 687
Number of Jacobian*vector evaluations : 863
Number of function eval. due to Jacobian eval. : 687
Number of error test failures : 16
Number of nonlinear iterations : 684
Number of nonlinear convergence failures : 5
Solver options:
Solver : CVode
Linear multistep method : BDF
Nonlinear solver : Newton
Linear solver type : SPGMR
Maximal order : 5
Tolerances (absolute) : 1e-06
Tolerances (relative) : 1e-06
Simulation interval : 0.0 - 14400.0 seconds.
Elapsed simulation time: 0.5743229999999997 seconds.
Done!
------------------------------
Running F01
------------------------------
Terminating simulation at t = 19032.528009 after signal from handle_event.
Final Run Statistics: ---
Number of steps : 195
Number of function evaluations : 250
Number of Jacobian evaluations : 4
Number of function eval. due to Jacobian eval. : 8
Number of error test failures : 7
Number of nonlinear iterations : 249
Number of nonlinear convergence failures : 0
Number of state function evaluations : 209
Number of state events : 1
Solver options:
Solver : CVode
Linear multistep method : BDF
Nonlinear solver : Newton
Linear solver type : DENSE
Maximal order : 5
Tolerances (absolute) : 1e-06
Tolerances (relative) : 1e-06
Simulation interval : 0.0 - 19032.528008525667 seconds.
Elapsed simulation time: 0.0017362999999992468 seconds.
Done!
[6]:
flst.CR01.plot_profiles(figsize=(10, 10))
moments = flst.CR01.result.mu_n[-1]
mean_size = moments[1] / moments[0] * 1e6
print('Mean crystal size: ', mean_size, end='\n\n')
Mean crystal size: 46.26220772243934
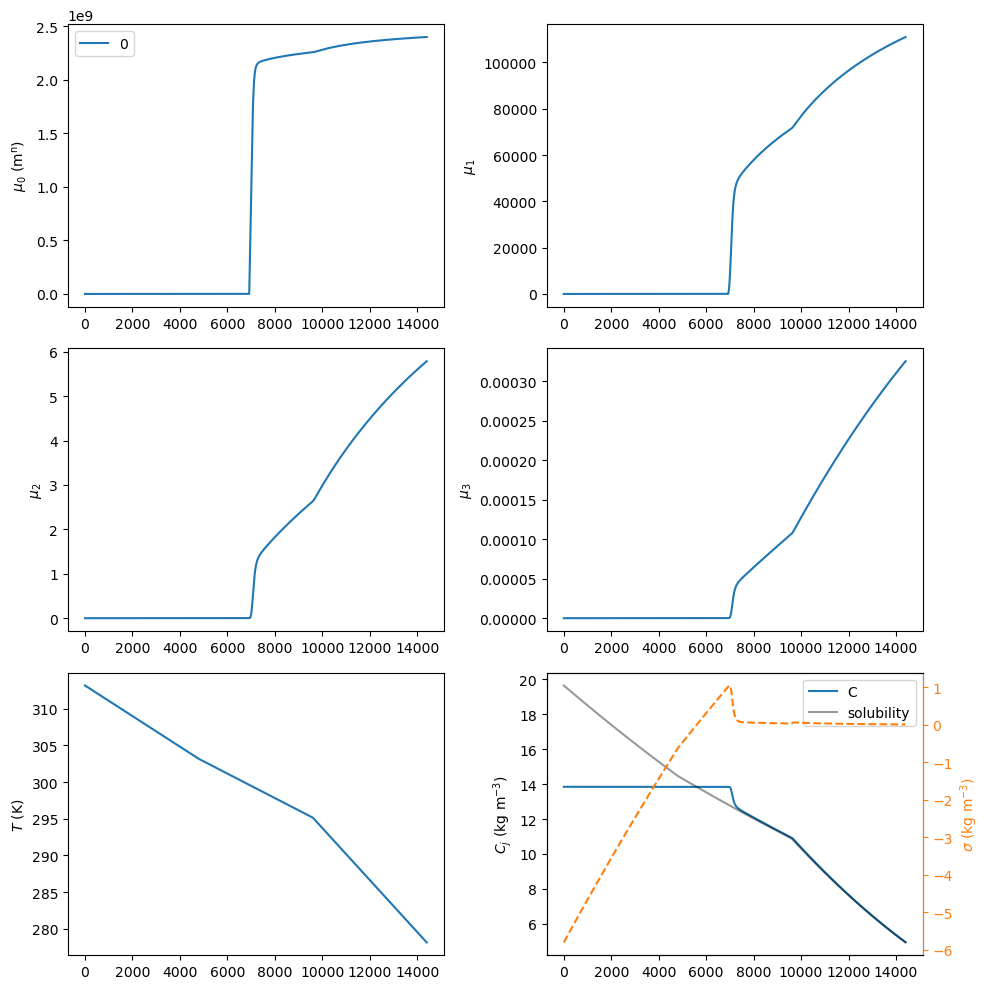
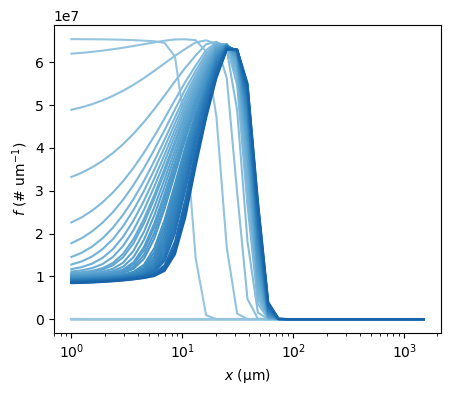
The complete crystal size distribution (CSD) can be plotted for different times using the plot_csd method of the crystallizer CR01 object. As seen in the bottom right panel above, supersaturation \(\sigma\) starts being positive around 3000 s, so that will be used as the initial time to plot the CSD. It is worth mentioning that PharmaPy will try to find the closest time to plot from the timegrid resulting from numerical integration
[7]:
flst.CR01.plot_csd(times=np.linspace(6000, 9000), figsize=(5, 4))
[7]:
(<Figure size 500x400 with 1 Axes>,
<AxesSubplot: xlabel='$x$ ($\\mathregular{\\mu m}$)', ylabel='$f$ ($\\mathregular{\\# \\ um^{-1}}$)'>)
[8]:
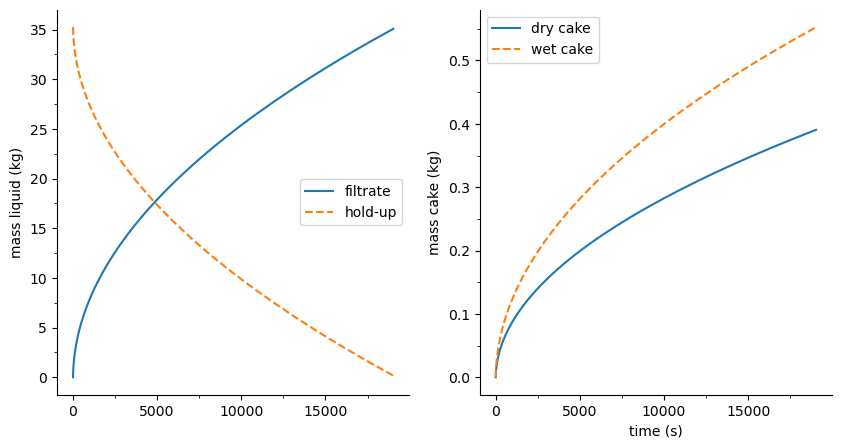
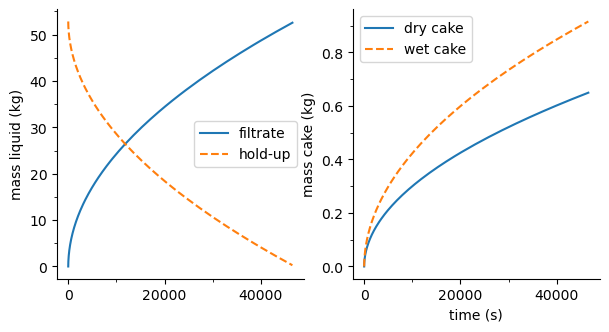
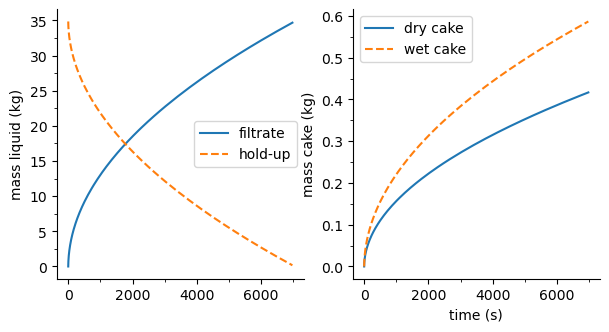
flst.F01.plot_profiles(figsize=(10, 5))
[8]:
(<Figure size 1000x500 with 2 Axes>,
array([<AxesSubplot: ylabel='mass liquid (kg)'>,
<AxesSubplot: xlabel='time (s)', ylabel='mass cake (kg)'>],
dtype=object))
Simulation objects also have result attribute (an object itself). When printed, it provides an overview of the simulation
[9]:
print(flst.result)
print(flst.R01.result)
---------------------
Welcome to PharmaPy
---------------------
Flowsheet structure:
R01 --> HOLD01 --> CR01 --> F01
---------------------------------------------------------------------
Unit operation Diff eqns Alg eqns Model type PharmaPy type
---------------------------------------------------------------------
R01 300 0 ODE PlugFlowReactor
HOLD01 7 0 ODE DynamicCollector
CR01 41 0 ODE BatchCryst
F01 2 0 ODE Filter
---------------------------------------------------------------------
------------------------
PharmaPy result object
------------------------
Fields shown in the tables below can be accessed as result.<field>, e.g. result.mole_conc
------------------------------------------------
states dim units index
------------------------------------------------
mole_conc 5 mol/L A, B, C, D, solvent
temp 1 K
------------------------------------------------
------------------------------
f(states) dim units index
------------------------------
q_rxn 1 W
q_ht 1 W
------------------------------
Time vector can be accessed as result.time
Process design
Now, flowsheet optimization will be explored. In the current exercise, we aim to scale up a process to produce 5 kg/day of the API of interest. Additonally, we are interested in the crystal product having a mean size of at least 40 microns. For this purpose, an optimization problem can be formulated, where raw material consumption (\(J\)) is to be minimized
subject to the PharmaPy model
and the constraints:
with \(M_{API}\) the mass of filtration cake obtained after the filtration step in F01.
Decision variables \(x\) will be:
Unit operation |
Variable (\(x\)) |
Units |
|---|---|---|
R01 |
\(\tau_{R01}\) |
s |
CR01 |
\(T_{k, CR01}\) |
K |
\(t_{CR01}\) |
s |
|
F01 |
\(\Delta P_{F01}\) |
Pa |
and three intermediate temperatures will be used as decision variables for CR01 (\(k = [1, 2, 3]\)). This gives a total of 6 decision variables. Number of batches a day \(N_{batches}\) can be calculated as:
where cycle time \(t_{cycle}\) is the maximum time among the processsing times for the individual unit operations, i.e. \(t_{cycle} = \max{(t_{R01}, t_{CR01}, t_{F01})}\). For simplicity, it will be assumed that R01 will flow material to HOLD01 during 2 h before transfering material to CR01, i.e. \(t_{R01} =\) 2h.
As done before, an unconstrained version of the optimization problem is formulated through a penalty method:
[10]:
def get_costs(sim, raw_costs):
raw_mat = sim.GetRawMaterials()
# print(raw_mat)
raw_mat = raw_mat.filter(regex='mass_').sum()
raw_cost = raw_mat * raw_costs
return raw_cost.to_dict()
def get_constraints(sim, temp_k, n_batches):
mu = sim.CR01.result.mu_n[-1]
mass_api = sim.F01.result.mass_cake_dry[-1]
mass_total = mass_api * n_batches
# print('mass_api_total: ', mass_total, end='\n\n')
temp_constr = temp_k[1:] - temp_k[:-1]
constraints = [40 - mu[1]/mu[0]*1e6, 5 - mass_total] + temp_constr.tolist() # concatenate lists
return constraints
def make_non_verbose(runargs):
for key in runargs:
runargs[key]['verbose'] = False
return runargs
def callback_opt(x, simulate=False, raw_material_cost=None, return_augm=True, weights=None):
if weights is None:
weights = np.ones(4) # four constraints (one for size, one for production and two for temperature)
else:
weights = np.asarray(weights)
tau_R01 = x[0]
temp_CR01 = x[1:4]
time_CR01 = x[4]
deltaP = x[-1]
# Create simulation
path_phys = '../data/compound_database.json'
# Initially define a flowsheet object for the simulation executive
# This object will allow us to simulate the entire flowsheet.
graph = 'R01 --> HOLD01 --> CR01 --> F01'
flst = SimulationExec(path_phys, flowsheet=graph)
# Specifying a stoichiometric matrix
rxns = ['A + B --> C', 'A + C --> D']
# Kinetics values; assuming deltaH values are 0.
k_vals = np.array([2.654e4, 5.3e2]) # Pre-exponential factor
ea_vals = np.array([4.0e4, 3.0e4]) # Activation Energies
# Use the imported RxnKinetics class to create a RxnKinetics instance
kinetics = RxnKinetics(path=path_phys, rxn_list=rxns, k_params=k_vals, ea_params=ea_vals)
##################
vol_liq = 0.010 # m**3
vol_flow = vol_liq / tau_R01 # m**3 / s
x_init = np.array([0, 0, 0, 0, 1]) # only solvent
temp_init = 298.15 # K
liquid_init = LiquidPhase(path_phys, temp_init, mole_frac=x_init, vol=vol_liq)
# Cooling water
temp_R01 = 313.15 # K
cw = CoolingWater(mass_flow=0.1, temp_in=temp_R01) # mass flow in kg/s
# ---------- Inlet streams
# Reactor
c_in = np.array([0.33, 0.33, 0, 0, 0])
temp_in = 20 + 273.15 # K
liquid_in = LiquidStream(path_phys, temp_in, mole_conc=c_in, vol_flow=vol_flow, name_solv='solvent')
diam_in = 1 / 2 * 0.0254 # 1/2 inch in m
flst.R01 = PlugFlowReactor(diam_in=diam_in, num_discr=50, isothermal=False)
flst.R01.Utility = cw
flst.R01.Kinetics = kinetics
flst.R01.Inlet = liquid_in
flst.R01.Phases = (liquid_init,)
flst.R01.Utility = cw
time_R01 = 2 * 3600 # s
# Holding tank
flst.HOLD01 = DynamicCollector()
# Crystallizer
prim = (3e8, 0, 3) # kP in #/m3/s
sec = (4.46e10, 0, 2, 1e-5) # kS in #/m3/s
growth = (5, 0, 1.32) # kG in um/s
dissol = (1, 0, 1) # kD in um/s
# 0.2269 - 1.88e-3 * 323.15 + 3.89e-6 * 323.15 ** 2
solub_cts = np.array([2.269e2, -1.88e0, 3.89e-3])
x_gr = np.geomspace(1, 1500, num=35)
distrib_init = np.zeros_like(x_gr)
solid_cry = SolidPhase(path_phys, x_distrib=x_gr, distrib=distrib_init,
mass_frac=[0, 0, 1, 0, 0])
# Piecewise temperature profile definition
temp_program = np.array([[313.15, temp_CR01[0]],
[temp_CR01[0], temp_CR01[1]],
[temp_CR01[1], temp_CR01[2]]], dtype=np.float64)
# Initialize lagrange polynomial control object
lagrange_fn = PiecewiseLagrange(time_CR01, temp_program)
# Defining the crystallizer with desired species 'C'
flst.CR01 = BatchCryst(target_comp='C', method='1D-FVM', scale=1e-9,
controls={'temp': lagrange_fn.evaluate_poly})
flst.CR01.Kinetics = CrystKinetics(solub_cts, nucl_prim=prim, nucl_sec=sec, growth=growth, dissolution=dissol)
flst.CR01.Phases = solid_cry
# Filter
alpha = 1e11
Rm = 1e10
filt_area = 200 # cm**2
diam = np.sqrt(4/np.pi * filt_area) / 100 # m
flst.F01 = Filter(diam, alpha, Rm)
# runargs for the flowsheet
runargs_R01 = {'runtime': time_R01}
sundials = {'maxh': 60}
runargs_hold = {'runtime': time_R01}
runargs_CR01 = {'runtime': time_CR01, 'sundials_opts': sundials}
runargs_F01 = {'runtime': None, 'deltaP': deltaP}
# ---------- Running simulation
run_kwargs = {'R01': runargs_R01,
'HOLD01': runargs_hold,
'CR01': runargs_CR01,
'F01': runargs_F01
}
run_kwargs = make_non_verbose(run_kwargs)
if simulate:
flst.SolveFlowsheet(kwargs_run=run_kwargs, verbose=False)
return flst
else:
# Simulate
flst.SolveFlowsheet(kwargs_run=run_kwargs, verbose=False)
# Calculate objective + constraints
t_cycle = max([flst.R01.result.time[-1], flst.CR01.result.time[-1], flst.F01.result.time[-1]])
n_batches = 24 * 3600 / t_cycle
costs = get_costs(flst, raw_material_cost) # J(x)
constraints = get_constraints(flst, temp_CR01, n_batches) # g_i(x)
if return_augm:
penalties = np.maximum(0, weights * constraints)
total_cost = sum(list(costs.values())) * n_batches
augmented_obj = total_cost + sum(penalties**2)
# print(augmented_obj)
return augmented_obj
else:
out = {'cost/batch': costs, 'size_constr': constraints[0], 'production_constr': constraints[1],
'temperature_constr': constraints[2:]}
return out
def print_di(di):
for key in di:
print(key + ':', di[key], end='\n\n')
Let’s run in simulation model to make sure everything is working internally
[11]:
x_init = np.array([1200, # tau_R01
300, # T_{1,CR01}
300, # T_{2,CR01}
280, # T_{3,CR01}
3600, # t_{CR01}
101325] # deltaP_{F01}
)
sim = callback_opt(x_init, simulate=True)
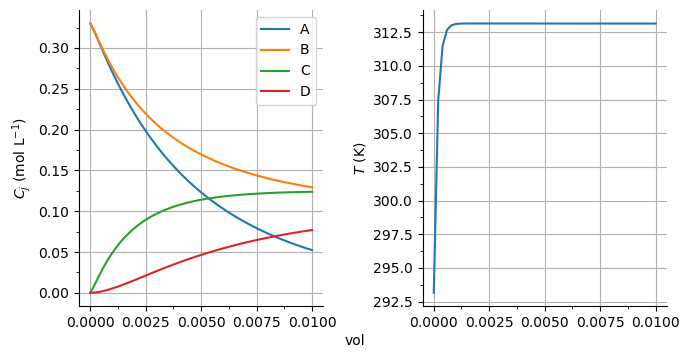
# Let's plot some dynamics and see what the results look like
sim.R01.plot_profiles(times=[sim.R01.result.time[-1]], pick_comp=('A', 'B', 'C', 'D'), figsize=(7, 3.5))
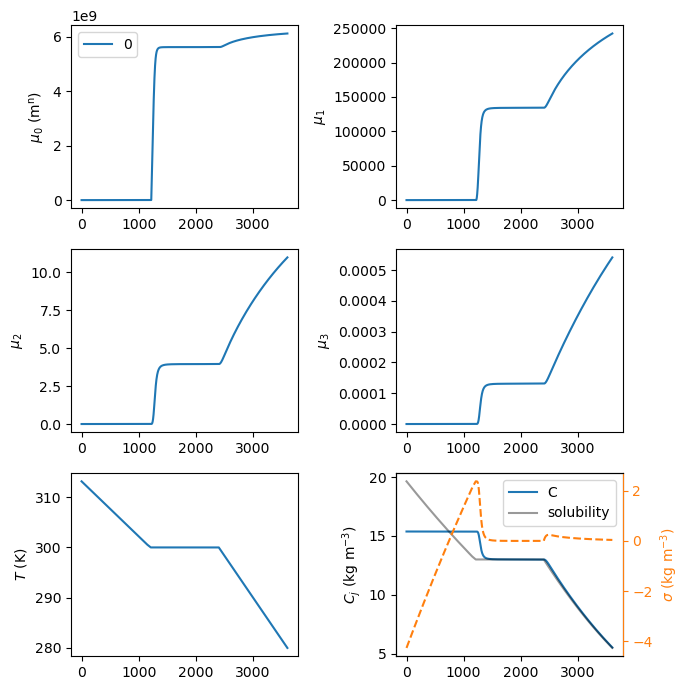
sim.CR01.plot_profiles(figsize=(7, 7))
sim.F01.plot_profiles(figsize=(7, 3.5))
[11]:
(<Figure size 700x350 with 2 Axes>,
array([<AxesSubplot: ylabel='mass liquid (kg)'>,
<AxesSubplot: xlabel='time (s)', ylabel='mass cake (kg)'>],
dtype=object))
As a second step, let’s call the objective function and see if it computes the costs correctly:
[12]:
raw_costs = np.genfromtxt('../data/raw_material_cost.csv', delimiter=',', skip_header=1)[:, 1]
weights = [100, 100, 1, 1] # These can be changed to emphasize on one constraint over the other
di_callback = callback_opt(x_init, simulate=False, raw_material_cost=raw_costs, weights=weights, return_augm=False)
print_di(di_callback)
augmented = callback_opt(x_init, raw_material_cost=raw_costs, weights=weights)
print('augmented_objective:', augmented, end='\n\n')
cost/batch: {'mass_A': 19.8, 'mass_B': 11.879999999999999, 'mass_C': 0.0, 'mass_D': 0.0, 'mass_solvent': 119.37392429236701}
size_constr: 0.44473731909014447
production_constr: 3.7957609916886987
temperature_constr: [0, -20]
augmented_objective: 146336.1644267248
Now, let’s try optimization. For this purpose, bounds on the studied decision variables will be passed, in order to make the optimization well behaved and physically coherent.
[13]:
from scipy.optimize import minimize
import time
optimopts = {'maxfev': 10}
temp_bounds = (273, 310)
bounds_di = {'tau_R01': (10*60, 2*3600), 'temp_CR01_1': temp_bounds, 'temp_CR01_2': temp_bounds, 'temp_CR01_3': temp_bounds,
't_CR01': (10*60, 4*3600), 'deltaP': (101325, 101325*5)}
bounds = list(bounds_di.values())
args_callback = (False, raw_costs, True, weights) # Anything after the x in the callback_opt argument sequence
tic = time.time()
result = minimize(callback_opt, x0=x_init, method='Nelder-Mead', args=args_callback, options=optimopts, bounds=bounds)
toc = time.time()
[14]:
print('Elapsed optimization time: %.1f seconds' % (toc - tic), end='\n\n')
print('Initial decision variables:')
print(x_init, end='\n\n')
print('SciPy result:')
print(result, end='\n\n')
di_optim = callback_opt(result.x, raw_material_cost=raw_costs, return_augm=False)
for key in di_optim:
print(key, di_optim[key], end='\n\n')
Elapsed optimization time: 14.5 seconds
Initial decision variables:
[ 1200 300 300 280 3600 101325]
SciPy result:
final_simplex: (array([[ 1260. , 300. , 300. ,
280. , 3600. , 101325. ],
[ 1220. , 303.33333333, 303.33333333,
273. , 3660. , 103013.75 ],
[ 1200. , 300. , 300. ,
280. , 3600. , 106391.25 ],
[ 1206.66666667, 301.11111111, 305.27777778,
279.41666667, 3620. , 101887.91666667],
[ 1200. , 300. , 300. ,
280. , 3780. , 101325. ],
[ 1200. , 310. , 300. ,
280. , 3600. , 101325. ],
[ 1200. , 300. , 300. ,
280. , 3600. , 101325. ]]), array([140223.13020198, 141099.56944139, 141815.6063707 , 143335.32231881,
144372.42127709, 144372.44440142, 146336.16442672]))
fun: 140223.13020197794
message: 'Maximum number of function evaluations has been exceeded.'
nfev: 10
nit: 3
status: 1
success: False
x: array([ 1260., 300., 300., 280., 3600., 101325.])
cost/batch {'mass_A': 18.857142857142854, 'mass_B': 11.314285714285713, 'mass_C': 0.0, 'mass_D': 0.0, 'mass_solvent': 114.53478504034953}
size_constr 0.18130803436770293
production_constr 3.736231167378055
temperature_constr [0.0, -20.0]
As seen above, somee of the constraints are still positive after 10 iterations (infeasible). The optimization can be restarted with the value of \(x\) contained in the optimization result object from SciPy. Also, the final simplex can be passed to speed up the second optimization round
[21]:
x_last = result.x
simplex = result.final_simplex[0]
optimopts = {'maxfev': 400, 'initial_simplex': simplex}
tic = time.time()
result_two = minimize(callback_opt, x0=x_last, method='Nelder-Mead', options=optimopts, args=args_callback, bounds=bounds)
toc = time.time()
[22]:
print('Elapsed optimization time: %.1f seconds' % (toc - tic), end='\n\n')
print(result_two, end='\n\n')
di_optim_two = callback_opt(result_two.x, return_augm=False, raw_material_cost=raw_costs)
print_di(di_optim_two)
Elapsed optimization time: 543.1 seconds
final_simplex: (array([[1.81817468e+03, 3.04512168e+02, 2.98743703e+02, 2.74987165e+02,
3.72843633e+03, 2.88148112e+05],
[1.81815768e+03, 3.04511872e+02, 2.98744043e+02, 2.74987872e+02,
3.72847233e+03, 2.88145125e+05],
[1.81816246e+03, 3.04511954e+02, 2.98743952e+02, 2.74987672e+02,
3.72846226e+03, 2.88145947e+05],
[1.81816363e+03, 3.04511972e+02, 2.98743926e+02, 2.74987626e+02,
3.72845974e+03, 2.88146147e+05],
[1.81816384e+03, 3.04511962e+02, 2.98743934e+02, 2.74987619e+02,
3.72845926e+03, 2.88146101e+05],
[1.81816472e+03, 3.04511973e+02, 2.98743922e+02, 2.74987582e+02,
3.72845741e+03, 2.88146223e+05],
[1.81815620e+03, 3.04511856e+02, 2.98744070e+02, 2.74987927e+02,
3.72847539e+03, 2.88144908e+05]]), array([ 1268.77938395, 1268.78925842, 100785.26476248, 100787.46204912,
100797.20005326, 100838.42071573, 130772.79570793]))
fun: 1268.779383947542
message: 'Maximum number of function evaluations has been exceeded.'
nfev: 400
nit: 199
status: 1
success: False
x: array([1.81817468e+03, 3.04512168e+02, 2.98743703e+02, 2.74987165e+02,
3.72843633e+03, 2.88148112e+05])
cost/batch: {'mass_A': 13.06805128853787, 'mass_B': 7.840830773122722, 'mass_C': 0.0, 'mass_D': 0.0, 'mass_solvent': 84.82273326730126}
size_constr: -2.8392118447161607
production_constr: -0.0003751649446286365
temperature_constr: [-5.768464416248889, -23.756538637020128]
Let’s compare initial and converged \(x\) values, as well as constraint values
[23]:
import pandas as pd
bounds_di = {'tau_R01': (10*60, 2*3600), 'temp_CR01_1': temp_bounds, 'temp_CR01_2': temp_bounds, 'temp_CR01_3': temp_bounds,
't_CR01': (10*60, 4*3600), 'deltaP': (101325, 101325*5)}
x_summary = pd.DataFrame(np.column_stack((x_init, result_two.x)),
index=list(bounds_di.keys()), columns=('initial', 'converged'))
print(x_summary)
constr_initial = {key: val for key, val in di_callback.items() if 'constr' in key}
constr_convgd = {key: val for key, val in di_optim_two.items() if 'constr' in key}
constr_summary = pd.DataFrame((constr_initial, constr_convgd), index=('initial', 'final'))
print(constr_summary.T)
initial converged
tau_R01 1200.0 1818.174682
temp_CR01_1 300.0 304.512168
temp_CR01_2 300.0 298.743703
temp_CR01_3 280.0 274.987165
t_CR01 3600.0 3728.436331
deltaP 101325.0 288148.111920
initial final
size_constr 0.444737 -2.839212
production_constr 3.795761 -0.000375
temperature_constr [0, -20] [-5.768464416248889, -23.756538637020128]
We can plot some results to see the current status of the converged solution
[24]:
sim_opt = callback_opt(result_two.x, simulate=True)
sim_opt.CR01.result
[24]:
------------------------
PharmaPy result object
------------------------
Fields shown in the tables below can be accessed as result.<field>, e.g. result.distrib
--------------------------------------------------
states dim units index
--------------------------------------------------
distrib 35 #/um 0, ..., 34
mass_conc 5 kg/m**3 A, B, C, D, solvent
vol 1 m**3
--------------------------------------------------
---------------------------------------------
f(states) dim units index
---------------------------------------------
supersat 1 kg/m**3
solubility 1 kg/m**3
temp 1 K
mu_n 4 m**n 0, ..., 3
vol_distrib 35 m**3/m**3 0, ..., 34
---------------------------------------------
Time vector can be accessed as result.time
[25]:
import matplotlib.pyplot as plt
from PharmaPy.Plotting import plot_function
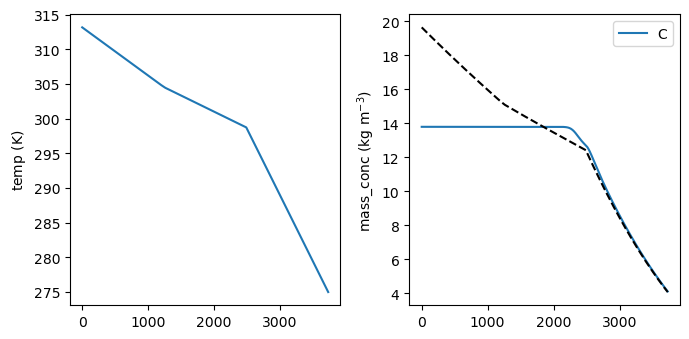
fi, ax = plot_function(sim_opt.CR01, state_names=['temp', ('mass_conc', ('C', ))], figsize=(7, 3.5),
ncols=2)
ax[1].plot(sim_opt.CR01.result.time, sim_opt.CR01.result.solubility, '--k')
fi.tight_layout()
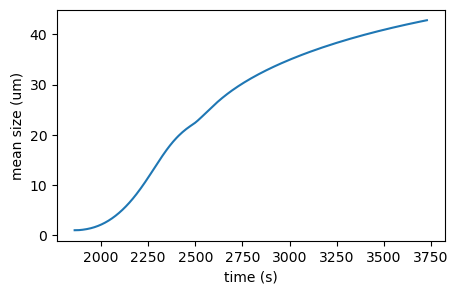
# Mean size constraint: CR01
moms = sim_opt.CR01.result.mu_n
fig, axis = plt.subplots(figsize=(5, 3))
axis.plot(sim_opt.CR01.result.time, moms[:, 1]/moms[:, 0] * 1e6)
axis.set_xlabel('time (s)')
axis.set_ylabel('mean size (um)')
# Production constraint: F01
sim_opt.F01.plot_profiles(figsize=(7, 3.5))
C:\Users\dcasasor\AppData\Local\Temp\ipykernel_15012\2394191268.py:13: RuntimeWarning: invalid value encountered in divide
axis.plot(sim_opt.CR01.result.time, moms[:, 1]/moms[:, 0] * 1e6)
[25]:
(<Figure size 700x350 with 2 Axes>,
array([<AxesSubplot: ylabel='mass liquid (kg)'>,
<AxesSubplot: xlabel='time (s)', ylabel='mass cake (kg)'>],
dtype=object))
[ ]:
BatchCryst()